Pointing and Science Cameras (ctapointing.camera)
The ctapointing.camera module contains generic descriptions of pointing cameras and science cameras used in the process of calculating pointing corrections. Besides camera properties such as focal length and pixel geometries, the classes provide coordinate transformations from/into the specific camera frames, using the proper telescope pointing.
API
ctapointing.camera Package
- class ctapointing.camera.ApogeeAspen8050Camera(**kwargs: Any)
Class that describes a generic Apogee Aspen 8050 CCD camera.
- __init__(config=None, parent=None, **kwargs)
- Parameters:
config (traitlets.loader.Config) – Configuration specified by config file or cmdline arguments. Used to set traitlet values.
parent (Tool or Component) – If a Component is created by another Component or Tool, you need to pass the creating Component as parent, e.g. parent=self. This makes sure the config is correctly handed down to the child components. Do not pass config in this case.
kwargs – Traitlets to be overridden. TraitError is raised if kwargs contains a key that does not correspond to a traitlet.
- class ctapointing.camera.DistortionCorrection(**kwargs: Any)
Base class for implementing distortion corrections.
- __init__(config=None, parent=None, **kwargs)
- Parameters:
config (traitlets.loader.Config) – Configuration specified by config file or cmdline arguments. Used to set traitlet values.
parent (Tool or Component) – If a Component is created by another Component or Tool, you need to pass the creating Component as parent, e.g. parent=self. This makes sure the config is correctly handed down to the child components. Do not pass config in this case.
kwargs – Traitlets to be overridden. TraitError is raised if kwargs contains a key that does not correspond to a traitlet.
- classmethod from_config(**kwargs)
Read a DistortionCorrection configuration from either configuration file or database. Either the path of a configuration file (‘input_url’) or a database collection (‘collection’) must be provided.
- Parameters:
input_url (str or Path) – path of the configuration file.
name (str) – name of the DistortionCorrection (as in DistortionCorrection.name). When loading the configuration from file, can be set to check that the configuration with the correct name is loaded. When loading from database, is used to identify the correct database record.
uuid (str) – UUID of the camera (as in DistortionCorrection.uuid). When loading the configuration from file, can be set to check that the configuration with the correct UUID is loaded. When loading from database, is used to identify the correct database record.
collection (str) – name of the database collection from which configuration is read
database (str) – name of the database in which the collection is stored
- Returns:
extractor
- Return type:
DistortionCorrection object
- name
distortion correction name
- uuid
UUID of Camera
- class ctapointing.camera.DistortionCorrectionBrownConrady(**kwargs: Any)
- class ctapointing.camera.DistortionCorrectionNull(**kwargs: Any)
- class ctapointing.camera.DistortionCorrectionSIP(**kwargs: Any)
Class implementing simple polynomial distortion correction for images
Pixel corrections are implemented according to “The SIP Convention for Representing Distortion in FITS Image Headers”
Currently, a 2nd order polynominal correction is implemented. For the transformation from ideal (intermediate) pixel coordinates to physical pixel coordinates:
\[ \begin{align}\begin{aligned}x_p = A_{10} x^1 y^0 + A_{20} x^2 y^0 + A_{11} x^1 y^1 + A_{02} x^0 y^2\\y_p = B_{10} x^1 y^0 + B_{20} x^2 y^0 + B_{11} x^1 y^1 + B_{02} x^0 y^2\end{aligned}\end{align} \]For the inverse transformation from physical pixel coordinates to ideal (intermediate) pixel coordinates:
\[ \begin{align}\begin{aligned}x = AP_{10} x_p^1 y_p^0 + AP_{20} x_p^2 y_p^0 + AP_{11} x_p^1 y_p^1 + AP_{02} x_p^0 y_p^2\\y = BP_{10} x_p^1 y_p^0 + BP_{20} x_p^2 y_p^0 + BP_{11} x_p^1 y_p^1 + BP_{02} x_p^0 y_p^2\end{aligned}\end{align} \]- apply_correction(coords)
Apply distortion correction from ideal (intermediate) pixel coordinates
(x, y)to physical pixel coordinates(xp, yp).- Parameters:
coords (np.array) – 2D array of ideal pixel positions
- Returns:
coords_p – 2D array of physical pixel positions
- Return type:
np.array
- apply_inverse_correction(coords_p)
Apply distortion correction from physical pixel coordinates
(xp, yp)to ideal (intermediate) pixel coordinates(x, y).- Parameters:
coords_p (np.array) – 2D array of physical pixel positions
- Returns:
coords – 2D array of ideal pixel positions
- Return type:
np.array
- class ctapointing.camera.FlashCam(**kwargs: Any)
- __init__(config=None, parent=None, **kwargs)
- Parameters:
config (traitlets.loader.Config) – Configuration specified by config file or cmdline arguments. Used to set traitlet values.
parent (Tool or Component) – If a Component is created by another Component or Tool, you need to pass the creating Component as parent, e.g. parent=self. This makes sure the config is correctly handed down to the child components. Do not pass config in this case.
kwargs – Traitlets to be overridden. TraitError is raised if kwargs contains a key that does not correspond to a traitlet.
- class ctapointing.camera.MAGICCam(**kwargs: Any)
Dummy implementation of a MAGIC camera.
- __init__(name='MAGICCam')
- Parameters:
config (traitlets.loader.Config) – Configuration specified by config file or cmdline arguments. Used to set traitlet values.
parent (Tool or Component) – If a Component is created by another Component or Tool, you need to pass the creating Component as parent, e.g. parent=self. This makes sure the config is correctly handed down to the child components. Do not pass config in this case.
kwargs – Traitlets to be overridden. TraitError is raised if kwargs contains a key that does not correspond to a traitlet.
- class ctapointing.camera.PointingCamera(**kwargs: Any)
Pointing camera class.
Hosts routines and parameters necessary to project Alt-Az coordinates into the chip plane.
Uses correct tangential projection into the chip plane (i.e. no small-angle approximation). Takes account for the orientation of the telescope (in Alt-Az coordinates), rotation of the camera w.r.t. the horizon, a tilt of the camera’s optical axis w.r.t. the telescope pointing, and possible shifts of the chip centre w.r.t. the optical axis and lens distortions.
The camera coordinate system has its origin exactly at the centre of the chip (for chips with odd number of pixels in the middle of the central pixel, for chips with even number of pixels at the boundary between the two innermost pixels).
Transformation of camera coordinates into chip coordinates follows the FITS/astropy standard, in which integer pixel coordinates are at the centre of a pixel, with pixel index 0 covering the range [-0.5, 0.5], representing physical pixel 1.
x points from bottom to top of the up-right chip, when viewing from the chip into the scene; y points from left to right.
By default, a ctapointing.camera.DistortionCorrectionNull model is loaded as the default for the correction of lens distortions. Any other DistortionCorrection model can be applied by adding it as a sub-component of the camera config in the configuration file.
- Parameters:
uuid (Unicode) – UUID of the camera
name (Unicode) – name of the camera
location (astropy.coordinates.EarthLocation) – location of the camera on Earth
f_stop (Float) – f_stop of the lens (focal length / aperture diameter)
num_pix (List of Int: number of pixels in x and y)
pixel_size (AstroQuantity[length]) – size of a pixel edge
tilt (AstroQuantity[angle]) – camera tilt w.r.t. telescope orientation (x/y)
offset (AstroQuantity[length]) – offset of chip centre w.r.t. telescope orientation (x/y)
rotation (AstroQuantity[angle]) – rotation of the camera around optical axis
noise_mean (List[float]) – list of mean noise values (one per pixel fraction)
noise_rms (List[float]) – list of rms noise values (one per pixel fraction)
noise_pixel_fraction (List[Float]) – list of pixel fractions
expansion_coefficient (Float) – chip expansion coefficient
efficiency (Float) – pixel efficiency
manufacturer (Unicode) – camera manufacturer
model (Unicode) – camera model
serial_number (Unicode) – camera serial number
telescope_id (Int) – telescope ID
dtype (Enum) – pixel depth (in bits)
used_since (AstroTime) – date and time of first operation
used_until (AstroTime) – date and time of decommissioning
- __init__(config=None, parent=None, **kwargs)
- Parameters:
config (traitlets.loader.Config) – Configuration specified by config file or cmdline arguments. Used to set traitlet values.
parent (Tool or Component) – If a Component is created by another Component or Tool, you need to pass the creating Component as parent, e.g. parent=self. This makes sure the config is correctly handed down to the child components. Do not pass config in this case.
kwargs – Traitlets to be overridden. TraitError is raised if kwargs contains a key that does not correspond to a traitlet.
- property aperture
Aperture of the camera lens.
- Returns:
aperture – lens aperture in millimeter-squared
- Return type:
astropy.Quantity
- bit_depth
pixel depth (bits)
- property chip_area
Camera chip area (in physical units).
- Returns:
area – chip area
- Return type:
astropy.Quantity
- property chip_centre
Camera chip centre in physical pixel coordinates.
for odd number of pixels, the chip centre is located at the centre of the central pixel, hence the centre corresponds to an integer in physical pixel coordinates
for even number of pixels, the chip centre is in between the innermost pixels, hence the centre corresponds to an integer+0.5 in physical pixel coordinates
the pixel with index 0 covers the coordinate range [-0.5, 0.5]
- Returns:
(centre_x, centre_y) – physical pixel coordinates of chip centre
- Return type:
array of floats
- property chip_size
Camera chip size (in physical units).
- Returns:
(size_x, size_y) – size along x and y axes
- Return type:
tuple of astropy.Quantity
- clip_to_chip(pix_coords, tolerance=0)
Clip an array of pixel coordinates to those coordinates which are inside the chip boundaries.
- Parameters:
pix_coords (array) – 2D array of pixel coordinates
tolerance (float) – tolerance in units of pixels
- Returns:
mask – boolean array of same shape as pix_coords, with positions which are inside the chip boundaries (and within tolerance) set to True (and False otherwise)
- Return type:
numpy.array
- efficiency
pixel efficiency
- expansion_coefficient
chip expansion coefficient
- f_stop
f-stop of lens
- focal_length
focal length of lens (x/y chip direction)
- property fov
Angular field of view.
- Returns:
(fov_x, fov_y) – field of view along x and y direction
- Return type:
tuple of astropy.Angle
- property fov_plane_projected
Field of view, projected onto a tangent plane of the unit sphere.
- Returns:
(fov_x, fov_y) – field of view along x and y direction, plane projected
- Return type:
tuple of astropy.Angle
- classmethod from_config(**kwargs)
Read a camera configuration from either configuration file or database. Either the path of a configuration file (‘input_url’) or a database collection (‘collection’) must be provided.
- Parameters:
input_url (str or Path) – path of the configuration file.
name (str) – name of the camera (as in PointingCamera.name). When loading the configuration from file, can be set to check that the configuration with the correct name is loaded. When loading from database, is used to identify the correct database record.
uuid (str) – UUID of the camera (as in PointingCamera.uuid). When loading the configuration from file, can be set to check that the configuration with the correct UUID is loaded. When loading from database, is used to identify the correct database record.
collection (str) – name of the database collection from which configuration is read
database (str) – name of the database in which the collection is stored
- Returns:
camera
- Return type:
PointingCamera object
- location
earth location of camera, either ‘x, y, z’ in geocentriccoordinates or site location string
- manufacturer
camera manufacturer
- model
camera model
- name
camera name
- noise_mean
list of mean noise values (one per pixel fraction)
- noise_pixel_fraction
list of pixel fractions
- noise_rms
list of rms noise values (one per pixel fraction)
- num_pix
camera chip number of pixels (x/y chip direction
- offset
offset of chip centre w.r.t. telescope orientation (x/y)
- property pixel_angle
Angle covered by a pixel edge in units of arcsec
- Returns:
angle – angle in arc seconds
- Return type:
astropy.Quantity
- pixel_size
camera pixel size
- property pixel_solid_angle
Returns the solid angle of a pixel in units of arc seconds squared
- Returns:
solid_angle – solid angle in arc seconds squared
- Return type:
astropy.Quantity
- project_from(coords, obstime, telescope_pointing)
Project given SkyCameraFrame coordinates back to AltAz.
- Parameters:
coords (SkyCoord in SkyCameraFrame) – coordinates on CCD chip in SkyCameraFrame
obstime (Astropy.Time) – time of the observation
telescope_pointing (SkyCoord) – telescope pointing direction
- Returns:
coords_altaz – transformed coordinates in the AltAz system
- Return type:
SkyCoord
- project_into(coords, telescope_pointing, use_obstime_of_first_coordinate=True)
Project a given array of altaz coordinates into the pointing camera chip. Takes current camera orientation, camera intrinsic parameters and distortions into account.
- Parameters:
coords (array(astropy.SkyCoord)) – array of sky coordinates in the AltAz system
telescope_pointing (astropy.SkyCoord) – telescope pointing position (RADec or AltAz system)
use_obstime_of_first_coordinate (bool) – use observation time of the first coordinate if array of SkyCoords is provided. This reduces computation time by a lot, and should be the default for coordinates that are part of the same image.
- Returns:
coords_proj (SkyCoord) – 2D projections in chip coordinates (in SkyCameraFrame)
todo (star projection is wrong when translation t is switched on. This happens because)
the altaz position of the (infinitely) distant star is converted to a vector on the
unit circle. Should explicitly distinguish between star projection and projection of
world objects.
- rotation
rotation of camera w.r.t. horizon, in degrees
- serial_number
camera serial number
- telescope_id
telescope ID
- tilt
camera tilt w.r.t. telescope orientation (x/y)
- transform_to_camera(coords_pix)
Transform coordinates from the pixel system to the SkyCameraFrame.
- Parameters:
coords_pix (2D array of pixel coordinates)
- Returns:
cam_coords – coordinates in SkyCameraFrame
- Return type:
SkyCoord
- transform_to_pixels(coords_cam)
Transform coordinates from the SkyCameraFrame to pixel coordinates.
- Parameters:
coords_cam (SkyCoord) – coordinates in the SkyCameraFrame
- Returns:
coords_pix – 2D array of pixel coordinates
- Return type:
numpy.array
- used_since
date of first usage
- used_until
date of decommissioning
- uuid
UUID of Camera
- class ctapointing.camera.SBIG_STC428_Camera(**kwargs: Any)
Class that describes an SBIG STC-428 CMOS camera.
- __init__(config=None, parent=None, **kwargs)
- Parameters:
config (traitlets.loader.Config) – Configuration specified by config file or cmdline arguments. Used to set traitlet values.
parent (Tool or Component) – If a Component is created by another Component or Tool, you need to pass the creating Component as parent, e.g. parent=self. This makes sure the config is correctly handed down to the child components. Do not pass config in this case.
kwargs – Traitlets to be overridden. TraitError is raised if kwargs contains a key that does not correspond to a traitlet.
- class ctapointing.camera.ScienceCamera(**kwargs: Any)
CTA Science camera class.
Stores information about the focal plane of the camera, its distance from the mirror dish, and the position of pointing LEDs. Provides a method to transform sky coordinates into positions on the planar focal plane.
- __init__(config=None, parent=None, **kwargs)
- Parameters:
config (traitlets.loader.Config) – Configuration specified by config file or cmdline arguments. Used to set traitlet values.
parent (Tool or Component) – If a Component is created by another Component or Tool, you need to pass the creating Component as parent, e.g. parent=self. This makes sure the config is correctly handed down to the child components. Do not pass config in this case.
kwargs – Traitlets to be overridden. TraitError is raised if kwargs contains a key that does not correspond to a traitlet.
- body_intensity
intensity of camera body (for simulations)
- body_vertex_positions_x
x coordinate of vertices defining body outer dimensions (for simulations, in camera frame)
- body_vertex_positions_y
y coordinate of vertices defining body outer dimensions (for simulations, in camera fram)
- property centre
Return the centre of the camera in the ScienceCameraFrame
- focal_length
focal length of mirror dish
- classmethod from_config(**kwargs)
Read a camera configuration from either configuration file or database. Either the path of a configuration file (‘input_url’) or a database collection (‘collection’) must be provided.
- Parameters:
input_url (str or Path) – path of the configuration file.
name (str) – name of the camera (as in ScienceCamera.name). When loading the configuration from file, can be set to check that the configuration with the correct name is loaded. When loading from database, is used to identify the correct database record.
uuid (str) – UUID of the camera (as in ScienceCamera.uuid). When loading the configuration from file, can be set to check that the configuration with the correct UUID is loaded. When loading from database, is used to identify the correct database record.
collection (str) – name of the database collection from which configuration is read
database (str) – name of the database in which the collection is stored
- Returns:
camera
- Return type:
ScienceCamera object
- led_intensity
LED intensities (for simulations)
- property led_positions
Return the camera LED positions in the ScienceCameraFrame
- led_positions_x
LED positions (x coordinate) in camera frame
- led_positions_y
LED positions (y coordinate) in camera frame
- led_radius
radius of the LED pinholes (for simulations)
- lid_intensity
intensity of camera lid (for simulations)
- lid_radius
radius of circular camera lid
- manufacturer
camera manufacturer
- mirror_area
effective area of mirror dish
- model
camera model
- name
camera name
- offset
offset of camera centre w.r.t. telescope orientation (x/y)
- project_from(coords, obstime, telescope_pointing)
Project given SkyCameraFrame coordinates back to AltAz.
- Parameters:
coords (SkyCoord in SkyCameraFrame) – coordinates on CCD chip in SkyCameraFrame
obstime (Astropy.Time) – time of the observation
telescope_pointing (SkyCoord) – telescope pointing direction
- Returns:
coords_altaz – transformed coordinates in the AltAz system
- Return type:
SkyCoord
- project_into(coords, telescope_pointing=None)
Project a given array of altaz coordinates into the science camera frame. Takes current camera orientation and tilts into account.
- Parameters:
coords (array(astropy.SkyCoord)) – array of sky coordinates in the AltAz system
telescope_pointing (astropy.SkyCoord) – telescope pointing position (RADec or AltAz system)
- Returns:
coords_proj (SkyCoord) – 2D projections in chip coordinates (in ScienceCameraFrame)
todo (star projection is wrong when translation t is switched on. This happens because)
the altaz position of the (infinitely) distant star is converted to a vector on the
unit circle. Should explicitly distinguish between star projection and projection of
world objects.
- rotation
rotation of camera w.r.t. horizon, in degrees
- property sciencecameraframe
Return a ScienceCameraFrame object, initialised from current camera (focal length, rotations, tilts etc.) properties.
Can be used to transform from/to SciemceCameraFrame using up-to-date transformation parameters.
- tilt
camera tilt w.r.t. telescope orientation (x/y)
- uuid
UUID of Camera
- class ctapointing.camera.ZWO_ASI2600_Camera(**kwargs: Any)
Class that describes a ZWO ASI2600-MM CMOS camera.
- __init__(config=None, parent=None, **kwargs)
- Parameters:
config (traitlets.loader.Config) – Configuration specified by config file or cmdline arguments. Used to set traitlet values.
parent (Tool or Component) – If a Component is created by another Component or Tool, you need to pass the creating Component as parent, e.g. parent=self. This makes sure the config is correctly handed down to the child components. Do not pass config in this case.
kwargs – Traitlets to be overridden. TraitError is raised if kwargs contains a key that does not correspond to a traitlet.
- ctapointing.camera.plot_camera_frame(camera, coords=None, camera_pointing_altaz=None, marker_size=1, **kwargs)
Plots the chip frame of a PointingCamera object, with useful curves to show altitude/azimuth projections, camera rotation and distortions. Can also be used to display a set of coordinates on the chip.
- Parameters:
camera (PointingCamera) – PointingCamera object
coords (array(SkyCoord)) – coordinates to plot into frame. Coordinates
must be given in the chip coordinate (SkyCameraFrame) system ToDo camera_pointing_altaz must not be none :param array(float) marker_size: individual marker size for each coordinate
further parameters (kwargs): :chip_centre: Plot the chip centre. True by default. :fov_centre: Plot the Fov centre. True by default. :chip_edges: Plot the chip edges. True by default. :alt_proj: Plot altitude lines. False by default. :az_proj: Plot azimuth lines. False by default. :proj_fov: Plot projected FoV circles. False by default. :chip_fov: Plot physical chip FoV circle. False by default.
- Returns:
plot handles (fig, ax)
- ctapointing.camera.plot_distortion_correction(camera, plot_inverse=False, ax=None)
Plot the distortion correction model stored in the camera object
Functions
|
Plots the chip frame of a PointingCamera object, with useful curves to show altitude/azimuth projections, camera rotation and distortions. |
|
Plot the distortion correction model stored in the camera object |
Classes
|
Pointing camera class. |
|
Class that describes a generic Apogee Aspen 8050 CCD camera. |
|
Class that describes an SBIG STC-428 CMOS camera. |
|
Class that describes a ZWO ASI2600-MM CMOS camera. |
|
CTA Science camera class. |
|
|
|
Dummy implementation of a MAGIC camera. |
|
Base class for implementing distortion corrections. |
|
Class implementing simple polynomial distortion correction for images |
|
|
|
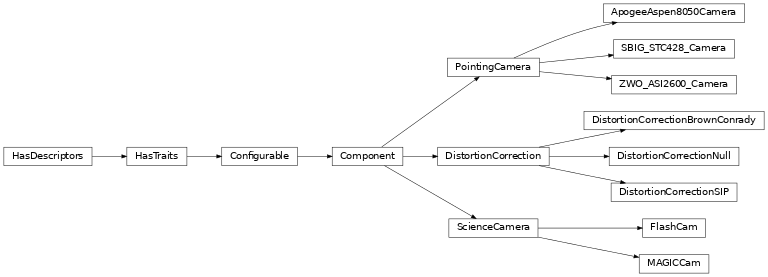
Class Inheritance Diagram