Image solving and fitting (ctapointing.imagesolver)
The ctapointing.imagesolver module contains the following core classes:
SpotExtractor: set of classes to extract spots from a ctapointing.Exposure objects, such as stars and science camera LEDs.
ImageSolver: provides functionality to register a set of extracted spots with a star catalog, i.e. functionality to identify which spot in an image belongs to which catalog star.
SkyFitter: class that fits the coordinate transformation between the ICRS positions of catalog stars and their respective spots in an image, providing precise information about e.g. the pointing of the centre of the camera chip and its rotation w.r.t. the horizon.
LEDFitter: class to determine the coordinate transformation between the LED positions on the front of the science camera and their positions in the pointing camera image. Provides information about e.g. the focal length of the telescope, and the position/rotation of the science camera w.r.t. the pointing camera.
ImageSolution: class that stores the information about the solved and fitted image, in particular parameters that fix the above mentioned coordinate transformations.
API
ctapointing.imagesolver Package
- class ctapointing.imagesolver.ImageMask(inverted=True)
Class that stores an image mask.
- __init__(inverted=True)
- dilate(dilation_radius: int) array
Dilate the mask using a (num_pixels x num_pixels) quadratic kernel.
- Parameters:
dilation_radius (float) – dilation radius
- Returns:
image_dilated – dilated image
- Return type:
np.array or None
- erode(erosion_radius: int) array
Return erosion of mask using a (num_pix x num_pix) quadratic kernel.
- Parameters:
erosion_radius (float) – erosion radius
- Returns:
image_eroded – erosion of mask image
- Return type:
np.array or None
- estimate_masked_area()
Estimate the area masked by the mask, relative to the FoV of the image.
- classmethod from_name(filename: str, inverted=True, **kwargs)
Read a ImageMask config from either file or database.
- Parameters:
filename (str) – filename of the mask fits file
kwargs (arguments forwarded to ImageMask.read_mask_from_fits())
- Returns:
mask
- Return type:
ImageMask object
- read_mask_from_fits(input_url: str, **kwargs) None
Read image mask from FITS file. By default, the mask is flipped on the vertical axis, since this is the standard for the real images.
- Parameters:
input_url (str or Path) – path to the FITS file
swap_y (bool) – flag to mirror mask along y-axis (default True)
- class ctapointing.imagesolver.ImageSolution(prefix=None, **fields)
Container for storing image solutions.
- uuid
UUID
- Type:
Field(default=None, type=str)
- telescope_pointing_ra
right ascension coordinate of telescope pointing
- Type:
Field(default=nan deg, unit=deg)
- telescope_pointing_dec
declination coordinate of telescope pointing
- Type:
Field(default=nan deg, unit=deg)
- telescope_pointing_alt
altitude coordinate of telescope pointing
- Type:
Field(default=nan deg, unit=deg)
- telescope_pointing_az
right ascension coordinate of telescope pointing
- Type:
Field(default=nan deg, unit=deg)
- nominal_telescope_pointing_ra
right ascension of nominal telescope pointing
- Type:
Field(default=nan deg, unit=deg)
- nominal_telescope_pointing_dec
declination of nominal telescope pointing
- Type:
Field(default=nan deg, unit=deg)
- mean_exposure_time
mean time of exposure (UTC)
- Type:
Field(default=None, type=Time)
- exposure_duration
exposure duration
- Type:
Field(default=nan s, unit=s)
- camera_focal_length
pointing camera focal length
- Type:
Field(default=nan m, unit=m)
- camera_rotation
pointing camera rotation
- Type:
Field(default=nan deg, unit=deg)
- camera_tilt_x
pointing camera tilt in x
- Type:
Field(default=nan deg, unit=deg)
- camera_tilt_y
pointing camera tilt in y
- Type:
Field(default=nan deg, unit=deg)
- camera_offset_x
pointing camera offset in x
- Type:
Field(default=nan m, unit=m)
- camera_offset_y
pointing camera offset in y
- Type:
Field(default=nan m, unit=m)
- camera_chip_temperature
pointing camera chip temperature
- Type:
Field(default=nan K, unit=K)
- camera_temperature
pointing camera housing temperature
- Type:
Field(default=nan K, unit=K)
- camera_humidity
pointing camera housing relative humidity
- Type:
Field(default=-1.0, type=float)
- camera_cooling_power
pointing camera relative chip cooling power
- Type:
Field(default=-1.0, type=float)
- num_quad_matches
number of quad matches
- Type:
Field(default=-1, type=int)
- num_quad_matches_selected
number of selected quad matches
- Type:
Field(default=-1, type=int)
- num_iterations_skyfit
number of iterations for sky fit
- Type:
Field(default=-1, type=int)
- num_outliers_skyfit
number of outliers for sky fit
- Type:
Field(default=-1, type=int)
- num_fitted_stars_skyfit
number of fitted stars in sky fit
- Type:
Field(default=-1, type=int)
- residual_mean_x
mean residual in x of sky fit
- Type:
Field(default=nan arcsec, unit=arcsec)
- residual_mean_y
mean residual in y of sky fit
- Type:
Field(default=nan arcsec, unit=arcsec)
- residual_rms_x
rms residual in x of sky fit
- Type:
Field(default=nan arcsec, unit=arcsec)
- residual_rms_y
rms residual in y of sky fit
- Type:
Field(default=nan arcsec, unit=arcsec)
- residual_r68
68% containment of residuals of sky fit
- Type:
Field(default=nan arcsec, unit=arcsec)
- residual_r95
95% containment of residuals of sky fit
- Type:
Field(default=nan arcsec, unit=arcsec)
- stars_fit_converged
True if fit converged
- Type:
Field(default=False, type=bool)
- stars_fit_quality
fit function at minimum
- Type:
Field(default=-1.0, type=float)
- stars_fitted_ra
RA position of fitted stars
- Type:
Field(default=None, unit=deg, dtype=float64, ndim=1)
- stars_fitted_dec
Dec position of fitted stars
- Type:
Field(default=None, unit=deg, dtype=float64, ndim=1)
- stars_fitted_x
x position of fitted stars
- Type:
Field(default=None, dtype=float64, ndim=1)
- stars_fitted_y
y position of fitted stars
- Type:
Field(default=None, dtype=float64, ndim=1)
- stars_fitted_mag
magnitude of fitted stars
- Type:
Field(default=None, dtype=float64, ndim=1)
- star_spots_fitted_ra
RA position of fitted spots
- Type:
Field(default=None, unit=deg, dtype=float64, ndim=1)
- star_spots_fitted_dec
Dec position of fitted spots
- Type:
Field(default=None, unit=deg, dtype=float64, ndim=1)
- star_spots_fitted_x
x position of fitted star spots
- Type:
Field(default=None, dtype=float64, ndim=1)
- star_spots_fitted_y
y position of fitted star spots
- Type:
Field(default=None, dtype=float64, ndim=1)
- star_spots_fitted_flux
intensity of fitted star spots
- Type:
Field(default=None, dtype=float64, ndim=1)
- mean_background
mean background in image
- Type:
Field(default=None, type=float)
- science_camera_focal_length
science camera focal length
- Type:
Field(default=nan m, unit=m)
- science_camera_rotation
science camera rotation
- Type:
Field(default=nan deg, unit=deg)
- science_camera_tilt_x
science camera tilt in x
- Type:
Field(default=nan deg, unit=deg)
- science_camera_tilt_y
science camera tilt in y
- Type:
Field(default=nan deg, unit=deg)
- science_camera_offset_x
science camera offset in x
- Type:
Field(default=nan m, unit=m)
- science_camera_offset_y
science camera offset in y
- Type:
Field(default=nan m, unit=m)
- science_camera_centre_x
x position of science camera centre
- Type:
Field(default=None, type=float)
- science_camera_centre_y
y position of science camera centre
- Type:
Field(default=None, type=float)
- leds_fitted_x
x position of fitted LEDs
- Type:
Field(default=None, dtype=float64, ndim=1)
- leds_fitted_y
y position of fitted LEDs
- Type:
Field(default=None, dtype=float64, ndim=1)
- led_spots_fitted_x
x position of fitted LED spots
- Type:
Field(default=None, dtype=float64, ndim=1)
- led_spots_fitted_y
y position of fitted LED spots
- Type:
Field(default=None, dtype=float64, ndim=1)
- led_fit_quality
LED fit function at minimum
- Type:
Field(default=-1.0, type=float)
- lid_spots_x
x position of lid spots
- Type:
Field(default=None, dtype=float64, ndim=1)
- lid_spots_y
y position of lid spots
- Type:
Field(default=None, dtype=float64, ndim=1)
- registration_time
registration time
- Type:
Field(default=None, unit=s)
- matching_time
matching time
- Type:
Field(default=None, unit=s)
- fitting_time
fitting time
- Type:
Field(default=None, unit=s)
- spotlist_uuid
SpotList UUID
- Type:
Field(default=None, type=str)
- image_uuid
image UUID
- Type:
Field(default=None, type=str)
- when_solved
time of solving
- Type:
Field(default=None, type=str)
- meta
dict of attached metadata
- Type:
dict
- prefix
Prefix attached to column names when saved to a table or file
- Type:
str
- __init__(prefix=None, **fields)
- classmethod from_name(name, **kwargs)
Load ImageSolution from HDF5 file or database. See ctapointing.io.from_name() for details.
- class ctapointing.imagesolver.ImageSolver(**kwargs: Any)
ImageSolver class.
Hosts algorithms to solve a given image, i.e. determine the position of each individual pixel in sky (RADec) coordinates. Needs a reasonably well-known pointing position for the image. On the basis of this pointing, catalog stars are selected and matched with image spots using quad matching. The matching algorithm of the astroalign package is used.
- classmethod from_config(**kwargs)
Read an ImageSolver configuration from either configuration file or database. Either the path of a configuration file (‘input_url’) or a database collection (‘collection’) must be provided.
- Parameters:
input_url (str or Path) – path of the configuration file.
name (str) – name of the ImageSolver (as in ImageSolver.name). When loading the configuration from file, can be set to check that the configuration with the correct name is loaded. When loading from database, is used to identify the correct database record.
uuid (str) – UUID of the camera (as in ImageSolver.uuid). When loading the configuration from file, can be set to check that the configuration with the correct UUID is loaded. When loading from database, is used to identify the correct database record.
collection (str) – name of the database collection from which configuration is read
database (str) – name of the database in which the collection is stored
- Returns:
extractor
- Return type:
SpotExtractor object
- matching_distance
maximum distance for quad matching in L2/L1 L0/L1 plane
- matching_radius
distance in pixels within which a star is matched to a spot in the field matching
- max_magnitude
maximum magnitude of stars for catalog search
- max_num_spots
maximum number of image spots used for matching
- max_num_stars
maximum number of stars used for matching
- max_pointing_deviation
assumed maximum angular deviation (in degrees) between true and nominalpointing position and/or pointing camera optical axisand true telescope pointing
- min_camera_shadow
assumed minimum FoV side length (in degrees) blocked by an(assumed square) science camera in the inner part of the image
- min_magnitude
minimum magnitude of stars for catalog search
- name
name of ImageSolver
- process(spotlist, exposure, estimated_pointing=None, fov_radius=None, image_solution=None)
Solve the image given an exposure object.
- Parameters:
spotlist (SpotList) – List of pixel coordinates of extracted spots
exposure (Exposure) – Exposure object. Should be removed at some point.
estimated_pointing (SkyCoord[RADec]) – guess of the optical axis pointing of the telescope. If None, try exposure.nominal_telescope_pointing
fov_radius (Angle or None) – radius of the field of view (for star matching) If set to None, estimated FoV from camera parameters
image_solution (ctapointing.imagesolver.ImageSolution) – object that is to be updated by the results of the image solving process. If None, new ImageSolution object is created and returned by this method.
- Return type:
Tuple of Registration object and best-match Quad object
- scale_tolerance
allowed deviation in true vs. nominal focal length of camera
- uuid
UUID of ImageSolver
- class ctapointing.imagesolver.LEDFitter(**kwargs: Any)
LED fitting class.
TODO: If we can really base this on a cicle fit, consider using the method proposed in https://link.springer.com/content/pdf/10.1007/s10851-010-0249-8.pdf
- static circlefit(spotlist)
Fit a circle to all coordinates of the spotlist.
- static construct_leds_on_circle(radius, position_angles, centre=None)
Construct LED position coordinates in the CTA CameraFrame (i.e. x points down, y points left when viewed from the dish)
radius: circle radius position_angles: list of position angles
returns: array of coordinates
- distance_goal
fit distance goal
- fixed_parameters
list of parameters fixed during fitting
- classmethod from_config(**kwargs)
Read a LEDFitter configuration from either configuration file or database. Either the path of a configuration file (‘input_url’) or a database collection (‘collection’) must be provided.
- Parameters:
input_url (str or Path) – path of the configuration file.
name (str) – name of the LEDExtractor (as in LEDFitter.name). When loading the configuration from file, can be set to check that the configuration with the correct name is loaded. When loading from database, is used to identify the correct database record.
uuid (str) – UUID of the camera (as in PointingCamera.uuid). When loading the configuration from file, can be set to check that the configuration with the correct UUID is loaded. When loading from database, is used to identify the correct database record.
collection (str) – name of the database collection from which configuration is read
database (str) – name of the database in which the collection is stored
- Returns:
extractor
- Return type:
LEDFitter object or None
- matching_distance
maximum distance between spot and predicted LED position (in pixels
- name
name of LEDFitter
- process(spotlist, exposure, science_camera, image_solution=None)
Fit a list of spots to science camera LEDs to find the transformation between pointing camera pixel coordinates and science camera coordinates.
- Parameters:
spotlist (ctapointing.imagesolver.SpotList) – spotlist of extracted LED spots
exposure (Exposure) – exposure object, holding information about the actual exposure (camera properties etc.)
science_camera (ctapointing.camera.ScienceCamera) – science camera object, storing the geometric properties of the science camera (LED positions etc.)
image_solution (ctapointing.imagesolver.ImageSolution) – image solution object that is updated with fit results. If None, a new object is created.
- Returns:
solution (ImageSolution) – ImageSolution object containing summary information on the result
m (iminuit.minuit) – minuit object for the sky -> pixels fit
m_inv (iminuit.minuit) – minuit object for the pixel -> intermediate pixel coordinates fit
- uuid
UUID of LEDFitter
- class ctapointing.imagesolver.Quad(objects, invariants, status=<Status.DEFAULT: 0>, quad_id=None)
Class representing a triangular quad object of either spot or star coordinates.
- __init__(objects, invariants, status=<Status.DEFAULT: 0>, quad_id=None)
- property area
Area of the quad, using Heron’s formula, calculated from the SkyCameraFrame coordinates.
- class ctapointing.imagesolver.QuadMatch(spot_quad, star_quad, status=<Status.DEFAULT: 0>)
Class for storing a match between a spot quad object and a star quad object.
- __init__(spot_quad, star_quad, status=<Status.DEFAULT: 0>)
- set_status(status, combine=True)
Sets status flag for the quad match and star and spot quad :param status: the status flag to be set :param combine: if True, add status flag to other existing flags
if False, set this status flag as the only one
- similarity_transform()
Perform similarity transform between spot and star quad.
For the similarity transform, scale, rotation and two offsets are fitted between the star quad and the spot quad of each QuadMatch object.
Transformation parameters are stored in the transformation_properties attribute of the QuadMatch object.
The status of the QuadMatch is set to SIMFITTED.
- transform_stars(stars=None, transformation_parameters=None)
Transform a set of stars using the transformation properties stored in this QuadMatch. Returns a new list of Star objects with updated SkyCameraFrame coordinates.
- class ctapointing.imagesolver.Registration(spot_list, star_list)
Registration class. Used to find matches between spot quads and star quads, using quad similarities.
Implements the following registration algorithms: (1) A search for best-matching quads based on geometric properties of the quads/ (2) A similarity transformation for selected quads that determines the rough
transformation between star and spot coordinates for these quads
A matching algorithm that can match further stars to spots, using the above similarity transform.
Furthermore, methods are implemented to select among chosen quads based on certain quad or transformation properties.
- __init__(spot_list, star_list)
Constructor.
- Parameters:
spot_list – list of Spot objects used in the primary quad matching.
star_list – list of Star objects used in the primary quad matching.
- static build_quads(object_list, object_status=<Status.USED: 1>, quad_name='')
Build (triangular) quads from each triplet of Star or Spot SkyCameraFrame coordinate pairs. With n objects given, exactly m = (n/3) “n choose 3” independent quads can be constructed. Quad information is composed of L2/L1 (the ratio of the largest and second-to-largest side lengths of the triangle), L1/L0 (the ratio of the second largest and smallest side lengths), as well as L2+L1+L0 (i.e. the circumference of the triangle).
- Parameters:
object_list – list of Spot or Star objects used to build the quads
object_status – status flag that can be used to select a subset of the objects from object_list
quad_name – prefix used to name the individual spots
- Returns quad_list:
list of all Quad objects built
- find_matches(radius=0.1)
Find matches between star Quad objects and Spot Quad objects, based on their geometric invariants.
The algorithm uses nearest neighbour matching in the L2/L1 - L0/L1 plane of the geometric invariants. It uses an efficient kd tree with k=2 for searching through all spot quads and identifying all star quads that match in this plane within a circle of given radius.
Resulting quad matches are stored in the objects QuadMatch list.
Note: If the search plane is densely populated and/or the search radius is large, there may exist more than one star-quad match for any given spot quad. Naturally, for some spot quads, no matching star quad will be found.
- Parameters:
radius – search radius for the kd tree search. All matches within this search radius will be returned.
- get_quad_matches(status=<Status.DEFAULT: 0>)
Return list of QuadMatch objects, matching status flag.
- get_quad_matches_transformed(status=<Status.SELECTED: 4>)
Returns a copy of selected QuadMatch objects, in which all StarQuad coordinates have been transformed to the SkyCameraFrame according to the transformation parameters of the similarity transform carried out for this QuadMatch.
- Parameters:
status – status flag for QuadMatch selection: only QuadMatches with this status flag set will be evaluated
- Returns:
list (deep copy) of transformed QuadMatch objects
- get_quads_spots(status=<Status.DEFAULT: 0>)
Return list of Quad objects constructed from Spots, matching status flag.
- get_quads_stars(status=<Status.DEFAULT: 0>)
Return list of Quad objects constructed from Stars, matching status flag.
- get_spots(status=<Status.DEFAULT: 0>)
Return list of stored Spot objects, matching status flag.
- get_stars(status=<Status.DEFAULT: 0>)
Return list of stored Star objects, matching status flag.
- preselect_by_scale(rtol=0.02)
From all primary QuadMatch objects, select those quad matches which match roughly in triangle circumference. This will reduce the number of false-positive quad matches quite a bit.
The selection is motivated by the fact that the focal length of the camera is a usually well-known constant. If chosen appropriately, star quads transformed into the SkyCameraFrame will have roughly the same circumference as spot quads.
Selected QuadMatch objects will obtain the status PRESELECTED.
- Parameters:
rtol – maximum accepted relative tolerance between the circumference of star and spot quads used for selection.
- select_by_similarity(exp_rotation=(<Quantity 0. deg>, <Quantity 5. deg>), exp_scale=(1.0, 0.1), tolerance=2.0, status=<Status.PRESELECTED: 2>)
Select QuadMatch objects based on their similarity transformation parameters.
(1) Perform a similarity transformation on all matched quad pairs, resulting in a set of four transformation parameters for each match: - rotation of star quad w.r.t. spot quad - scaling of star quad w.r.t. spot quad - offsets (x, y) between star quad and spot quads.
(2) Create a histogram of each parameter. We expect a smooth distribution in the parameter for falsely matched quads, and a narrow peak for those quad matches that are correctly matched.
(3) Find the peak in each of the parameter distributions, and select, based on the peak width and the tolerance argument, all quad matches closely around the peak.
Accept all quad matches which pass selection in all parameters.
Selected QuadMatch objects will be marked with status SELECTED.
- Parameters:
exp_rotation – tuple of Angle expected relative rotation between fitted star and spot quads and maximum tolerance (usually 0.0 deg, 10.0 deg)
exp_scale – tuple of float expected scaling between fitted star and spot quads and maximum tolerance (usually 1.0, 0.1)
tolerance – relative tolerance for cut around the peak. Set to None to disable the automatic procedure
and instead use the expected parameter ranges given as arguments
- similarity_transform(status=<Status.PRESELECTED: 2>)
Perform similarity transform between quads of stored QuadMatch objects.
For the similarity transform, scale, rotation and two offsets are fitted between the star quad and the spot quad of each QuadMatch object.
Transformation parameters are stored in the transformation_properties attribute of the QuadMatch object.
The status of the QuadMatch is set to SIMFITTED.
- Parameters:
status – status flag for QuadMatch selection: only QuadMatches with this status flag set will be evaluated
- class ctapointing.imagesolver.SkyFitter(**kwargs: Any)
Sky fitting class
Fits a list of spots to matched stars using the full transformation tree or an astropy WCS transformation
- distance_goal
fit distance goal
- fit_camera_distortion
fit camera distortion parameters
- fixed_parameters
list of parameters fixed during fitting
- classmethod from_config(**kwargs)
Read a SkyFitter configuration from either configuration file or database. Either the path of a configuration file (‘input_url’) or a database collection (‘collection’) must be provided.
- Parameters:
input_url (str or Path) – path of the configuration file.
name (str) – name of the SpotExtractor (as in SkyFitter.name). When loading the configuration from file, can be set to check that the configuration with the correct name is loaded. When loading from database, is used to identify the correct database record.
uuid (str) – UUID of the camera (as in PointingCamera.uuid). When loading the configuration from file, can be set to check that the configuration with the correct UUID is loaded. When loading from database, is used to identify the correct database record.
collection (str) – name of the database collection from which configuration is read
database (str) – name of the database in which the collection is stored
- Returns:
fitter
- Return type:
SkyFitter object or None
- max_num_fit_iterations
maximum number of fit iterations
- name
name of SkyFitter
- process(spot_star_match_list, exposure, estimated_pointing=None, distortion_correction=None, image_solution=None)
Fit a list of spots to pre-matched stars to find the transformation parameters for coordinate transformations from pixel coordinates to sky coordinates.
The fit uses the full (non-idealised) set of coordinate transformations, taking into account refraction effects in the atmosphere and lens distortion.
- Parameters:
spot_star_match_list (list) – list of StarSpotMatch objects that contain information about the pre-matched spot-star pairs
exposure (Exposure) – exposure object, holding information about the actual exposure (camera properties etc.)
estimated_pointing (astropy.SkyCoord) – estimated telescope pointing position (in the ICRS frame)
image_solution (ctapointing.imagesolver.ImageSolution) – image solution object that is updated with fit results. If None, a new object is created.
- Returns:
solution (ImageSolution) – ImageSolution object containing summary information on the result
m (iminuit.minuit) – minuit object for the sky -> pixels fit
m_inv (iminuit.minuit) – minuit object for the pixel -> intermediate pixel coordinates fit
- residual_cut
cut value for spot outlier removal
- uuid
UUID of SkyFitter
- class ctapointing.imagesolver.Spot(c_radec=None, c_skycam=None, c_pix=None, flux=None, mean_background=None, status=<Status.USED: 1>, id=None)
Class for storing spot positions.
- __init__(c_radec=None, c_skycam=None, c_pix=None, flux=None, mean_background=None, status=<Status.USED: 1>, id=None)
- class ctapointing.imagesolver.SpotExtractorLED(**kwargs: Any)
SpotExtractor for the camera LEDs
- __init__(config=None, parent=None, **kwargs)
- Parameters:
config (traitlets.loader.Config) – Configuration specified by config file or cmdline arguments. Used to set traitlet values.
parent (Tool or Component) – If a Component is created by another Component or Tool, you need to pass the creating Component as parent, e.g. parent=self. This makes sure the config is correctly handed down to the child components. Do not pass config in this case.
kwargs – Traitlets to be overridden. TraitError is raised if kwargs contains a key that does not correspond to a traitlet.
- generate_led_mask(exposure, science_camera, circle_radius=100)
Construct a mask that is suited for extracting the LED positions from an exposure image.
The algorithm calculates, based on the hardware position of the LEDs in the science camera, the expected position of the LED spots in the exposure (taking into account the pointing camera parameters from the exposure object). It then constructs a circular mask around the LED positions.
- Parameters:
exposure (ctapointing.exposure.Exposure) – exposure for which the mask shall be constructed
science_camera (ctapointing.camera.ScienceCamera) – science camera object, the LED positions of which are used to create the LED mask
circle_radius (int) – radius of circle around LED positions (pixels)
- class ctapointing.imagesolver.SpotExtractorLid(**kwargs: Any)
SpotExtractor for the camera lid
- __init__(config=None, parent=None, **kwargs)
- Parameters:
config (traitlets.loader.Config) – Configuration specified by config file or cmdline arguments. Used to set traitlet values.
parent (Tool or Component) – If a Component is created by another Component or Tool, you need to pass the creating Component as parent, e.g. parent=self. This makes sure the config is correctly handed down to the child components. Do not pass config in this case.
kwargs – Traitlets to be overridden. TraitError is raised if kwargs contains a key that does not correspond to a traitlet.
- generate_lid_mask(exposure, science_camera)
Construct a mask that is suited for extracting the spots on the camera lid.
It creates a circular masked region centred at the position of the science camera in the image, with a radius that corresponds to the physical radius of the lid (as stored in the ctapointing.camera.ScienceCamera class).
- Parameters:
exposure (ctapointing.exposure.Exposure) – exposure for which the mask shall be constructed
science_camera (ctapointing.camera.ScienceCamera) – science camera object, the lid radius of which are used to create the lid mask
- science_camera_name
name of science camera
- class ctapointing.imagesolver.SpotExtractorSky(**kwargs: Any)
SpotExtractor for sky fields.
- __init__(config=None, parent=None, **kwargs)
- Parameters:
config (traitlets.loader.Config) – Configuration specified by config file or cmdline arguments. Used to set traitlet values.
parent (Tool or Component) – If a Component is created by another Component or Tool, you need to pass the creating Component as parent, e.g. parent=self. This makes sure the config is correctly handed down to the child components. Do not pass config in this case.
kwargs – Traitlets to be overridden. TraitError is raised if kwargs contains a key that does not correspond to a traitlet.
- class ctapointing.imagesolver.SpotList(prefix=None, **fields)
Container for storing spot lists.
- uuid
UUID
- Type:
Field(default=None, type=str)
- spot_type
spot type (0: UNKNOWN, 1: SKY, 2: LED, 3: LID
- Type:
Field(default=None, dtype=int64, ndim=1)
- coord_x
x coordinate of spot
- Type:
Field(default=None, dtype=float64, ndim=1)
- coord_y
y coordinate of spot
- Type:
Field(default=None, dtype=float64, ndim=1)
- var_x
variance of spot profile along x
- Type:
Field(default=None, dtype=float64, ndim=1)
- var_y
variance of spot profile along y
- Type:
Field(default=None, dtype=float64, ndim=1)
- cov_xy
covariance of spot profile
- Type:
Field(default=None, dtype=float64, ndim=1)
- flux
flux of spot
- Type:
Field(default=None, dtype=float64, ndim=1)
- peak
peak flux of spot
- Type:
Field(default=None, dtype=float64, ndim=1)
- mean_background
mean background in image
- Type:
Field(default=nan, type=float)
- rms_background
rms background in image
- Type:
Field(default=nan, type=float)
- start_time
start time of exposure
- Type:
Field(default=None, type=Time)
- duration
exposure duration
- Type:
Field(default=nan s, unit=s)
- moon_position_az
moon position azimuth
- Type:
Field(default=nan deg, unit=deg)
- moon_position_alt
moon position altitude
- Type:
Field(default=nan deg, unit=deg)
- moon_phase
moon phase
- Type:
Field(default=-1.0, type=float)
- sun_position_az
sun position azimuth
- Type:
Field(default=nan deg, unit=deg)
- sun_position_alt
sun position altitude
- Type:
Field(default=nan deg, unit=deg)
- chip_temperature
camera chip temperature
- Type:
Field(default=nan K, unit=K)
- camera_temperature
camera housing temperature
- Type:
Field(default=nan K, unit=K)
- cooling_power
relative chip cooling power
- Type:
Field(default=-1.0, type=float)
- camera_humidity
camera housing humidity
- Type:
Field(default=-1.0, type=float)
- image_uuid
image UUID
- Type:
Field(default=None, type=str)
- camera_uuid
camera UUID
- Type:
Field(default=None, type=str)
- extractor_uuid
spot extractor UUID
- Type:
Field(default=None, type=str)
- detection_threshold
spot detection threshold
- Type:
Field(default=nan, type=float)
- when_extracted
time of spot extraction
- Type:
Field(default=None, type=str)
- meta
dict of attached metadata
- Type:
dict
- prefix
Prefix attached to column names when saved to a table or file
- Type:
str
- __init__(prefix=None, **fields)
- append(spot_list, copy_meta: bool = False)
Append spots of another SpotList object to self. Only spot information is appended, i.e. any metadata, such as start time, is not touched, unless copy_meta is True
- Parameters:
spot_list (SpotList or None) – Spot list the spots of which should be appended
copy_meta (bool) – flag that indicates to copy metadata
- property coords_pix
Return the pixel coordinates as an array.
- classmethod from_name(name, **kwargs)
Load SpotList from HDF5 file or database. See ctapointing.io.from_name() for details.
- class ctapointing.imagesolver.SpotType(value)
Spot type class.
- class ctapointing.imagesolver.Star(c_radec=None, c_skycam=None, c_pix=None, magnitude=None, status=<Status.USED: 1>, id=None)
Class for storing star positions.
- __init__(c_radec=None, c_skycam=None, c_pix=None, magnitude=None, status=<Status.USED: 1>, id=None)
- class ctapointing.imagesolver.Status(value)
Status flags used during spot extraction, matching and fitting.
- ctapointing.imagesolver.plot_angular_distance_radec(star_spot_match_list, exposure, plot_distance_squared=False)
Plot (angular distance)**2 between matched stars and spots.
- ctapointing.imagesolver.plot_image_fit(quad_match, exposure)
Plot the exposure image, with fitted stars overlaid.
- ctapointing.imagesolver.plot_quad_parameter_space(registration)
Plot all preselected and selected spot and star quads in (1) the L1/L0 vs L2/L1 parameter space (2) the L1/L0 vs quad circumference space
- ctapointing.imagesolver.plot_quad_transformation_parameters(registration)
Plot distribution of similarity transformation parameters for preselected and selected quad matches: (1) rotation and scale factor between the quads (2) corner deviation between spots vs. averaged quad side length (3) corner deviation vs. scale factor
Functions
|
|
|
Plot all preselected and selected spot and star quads in (1) the L1/L0 vs L2/L1 parameter space (2) the L1/L0 vs quad circumference space |
|
Plot distribution of similarity transformation parameters for preselected and selected quad matches: (1) rotation and scale factor between the quads (2) corner deviation between spots vs. |
|
Plot (angular distance)**2 between matched stars and spots. |
|
Plot the exposure image, with fitted stars overlaid. |
Classes
|
SpotExtractor for sky fields. |
|
SpotExtractor for the camera LEDs |
|
SpotExtractor for the camera lid |
|
Container for storing spot lists. |
|
Spot type class. |
|
ImageSolver class. |
|
Class that stores an image mask. |
|
LED fitting class. |
|
Sky fitting class |
|
Registration class. |
|
Class for storing spot positions. |
|
Class for storing star positions. |
|
Class representing a triangular quad object of either spot or star coordinates. |
|
Class for storing a match between a spot quad object and a star quad object. |
|
Status flags used during spot extraction, matching and fitting. |
|
Container for storing image solutions. |
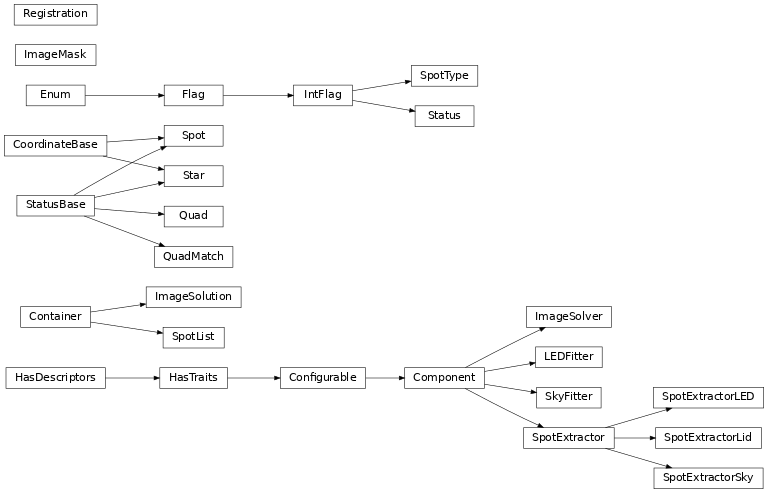
Class Inheritance Diagram